
あけましておめでとうございます!
リバネスロボ研のくすです。
1月、さすがに寒いのでロボ研は暖房を入れました。
が、子供たちには「暑い」と不評です。みんな元気だなあ。。
1月は二足歩行ロボットを作ろう!がテーマです。
まずはスタートアップはキットを使って作ってみます。


同じように作っても、上手く足が動かない。
すぐ倒れてしまう。。 ちょっとしたバランスや、足の角度で
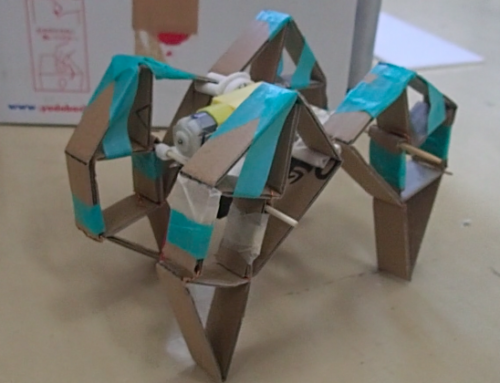
大きく違うようです。苦労しながら前に進むロボットに仕上げてもらいました。
早く出来た子は、早速改造。
さて、今回作ったロボット、
「ロボット歩き」と「人間の歩き方」を
比べてみると、ずいぶん違いがあるようです。
いろいろ意見を聞いてみると、「ロボットはぎこちない」「カクカクしてる」「右足、左足、右足ってバタバタ体重をかけてる感じ・・」などなど。
「重心」という言葉もちらほら出ていましたが、バランスの取り方が
人とはずいぶん違うみたい。
「人間の歩き方」に近づけるにはどうしたらいいのか。。
これはまさに今、研究が進められているところ。。


Leave A Comment