
ロボ研の藤田大悟です。
今月は二足歩行ロボットに挑戦です。
スタートアップの1回目は既存のキットをつかってロボットをつくってもらいました。
そこで学んだのが「クランク機構」。
自転車のペダルや店先のひさしを動かす装置(ロボ研の前にもあります)のように、
回転運動を直線運動に変更させる機構です。
この仕組みを理解した上で、どれくらい二足歩行をつくるのが難しいかを
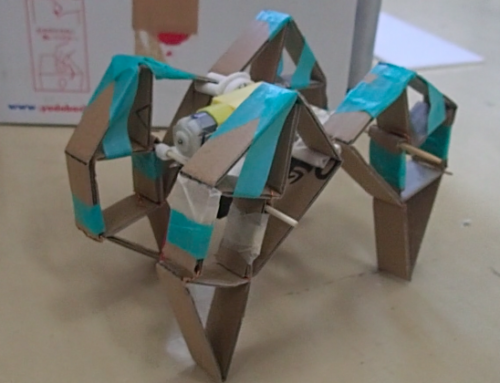
体感してもらうために、ギヤボックス、スイッチ、割り箸、スタイロフォームだけを渡して
二足歩行するロボットづくりに挑戦してもらいました。
挑戦しはじめて、まず立たない。。。
足の幅、股関節の距離、足の長さ、かかととつま先のバランスなど
要素が多すぎて重心を考えるのが難しいのです。
そして、歩かない。。。
ギヤ比が高すぎると歩行しようとしてもバランスが崩れてしまう。
足が大きすぎると足を前に出す動作ができない。
クランクをうまくつくれないと、交互に足が動かない。
試行錯誤の上、いくつかは「歩く?」ような動作ができるものがいくつかできました。

アシモなどが、どれくらい複雑な方法で動いているかを
肌で感じた瞬間です。


Leave A Comment