
ロボ研の藤田大悟です。アドバンストコースの最終月。
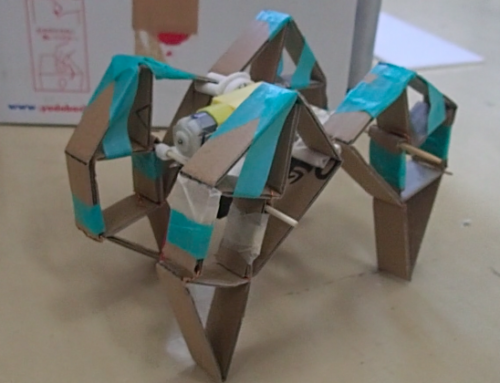
今まで学んだ事を総動員をして、クワガタの動きをするロボットを作成。
ベースであるギヤをイモネジなど細かい部品に注意しながら作成。
ギヤ比の確認。126:1で、けっこう力強いなと感じたようです。

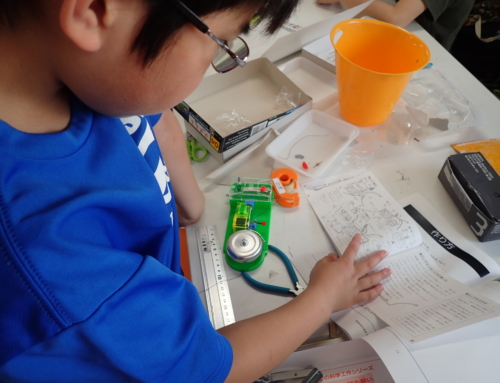
そして、コントローラーも作りました。
たくさんの大きさのボルトとナットを活用し、本体とのコードを配線。

かなり複雑なものなので、多くの子はここで終了。
後半は2週間後。
でも、はやい子はクランク・リンクを使って上下左右に動く「あご」を作成。
複雑なリンク機構をつくりはじめました。

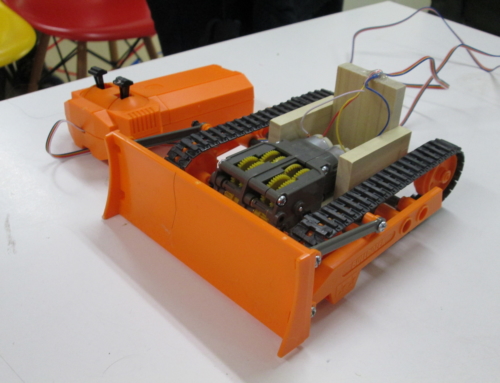
次回で、オリジナルのロボットを完成させ、アドバンストコースの終了です。


Leave A Comment