
ロボ研の藤田大悟です。
スマートコースでは前回から、赤外線追尾ロボット作りに挑戦しています。
既存のマシンに、ユニットを加えることで、新しい機能をもたせます。
今回は、事前に僕の方でつくっておいた基板に電子部品を実装し、
ロボットを完成させます。
今回は通常のプリント基板とことなり、NCで切り出したものなので
すこしハンダの取り付け方が難しいという点がありましたが、丁寧にハンダ付け。

一カ所、失敗してコードで直接配線することになりましたが、なんとか無事完成。
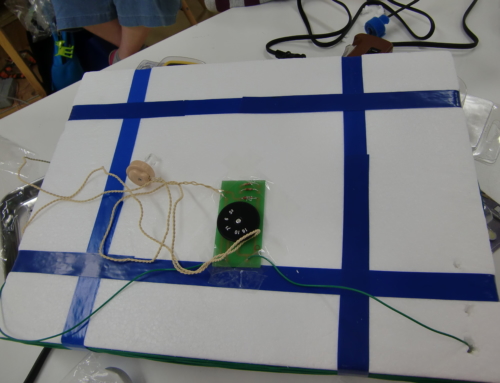
6足歩行ロボットのコントローラーを取り外し、
今回のユニットをとりつけました!
スイッチをいれると、、、あれ?
動かない。
テスターで確認してみたら、電池ボックスが不良で、電圧がでていませんでした。
気を取り直して電池ボックスを変えてスイッチをいれると、動き始めました!
赤外線コントローラーも、ちゃんと携帯のカメラで赤外線が出ている事を確認。
ロボットに、赤外線を当てると、しっかりと近づいていきました。

まさに、自動的に赤外線に近づくので、ロボットですね。
スマートコースの後半、いよいよロボットづくりに突入。
年明けから本格的に「ロボット」開発に入り始めます。



Leave A Comment