
ロボ研の藤田大悟です。
Advancedコースも残り2ヶ月。だんだんレベルの高い内容に挑戦しています。
今回のテーマは「リンク機構」
棒をいくつか上手に繋ぐ事で、いろいろと複雑な動きをつくることができます。
リンク機構は新しいものを発見したら特許をとれるくらい、とても重要な技術なのです。
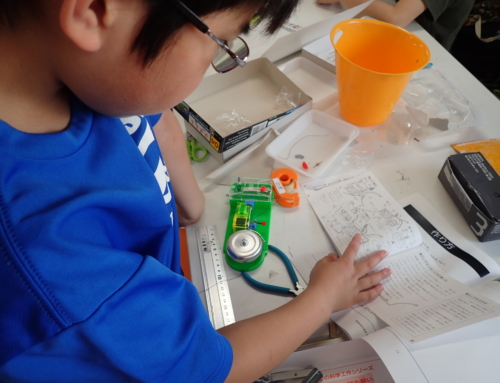
今回、まずはユニバーサルアームを用いてマジックハンドをつくってもらい原理を理解。
そこから、自分で試行錯誤して、様々な形のリンクを自作。
侍のように叩くリンク、踊っているような動きをするリンクなど様々なものができあがりました。


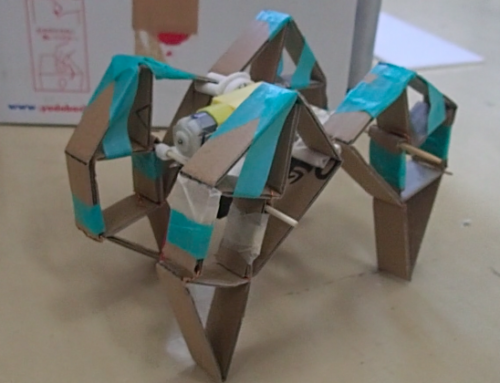
その後は、キットを使って四足歩行をするためのリンク機構を学び
実際にロボットを作成。
軸の位置がすこしちがうだけで動きが変わったり、動かなくなったりして
おもしろかったようです。

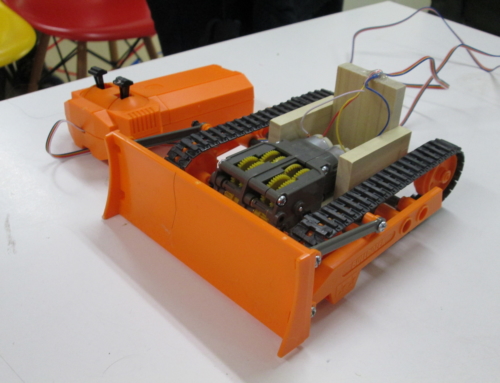
次回は、これを改造して6足歩行ロボットにします!


Leave A Comment