
ロボ研の藤田大悟です。
2月のAdvancedコースでは、リンク機構を学んでいます。
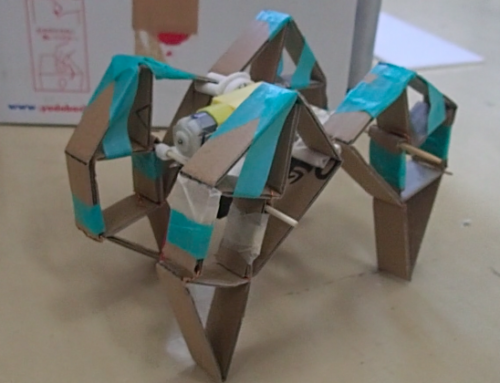
前回4足歩行を作った経験を活かし、自分で6足歩行に改造しました。
いろいろとリンク機構を考えながら、動きを観察し、それぞれオリジナルの6足リンクができました。

シンプルな構造を自分でみつけだしました!

やたら足を長くしています。

こちらもスマートな6足歩行。

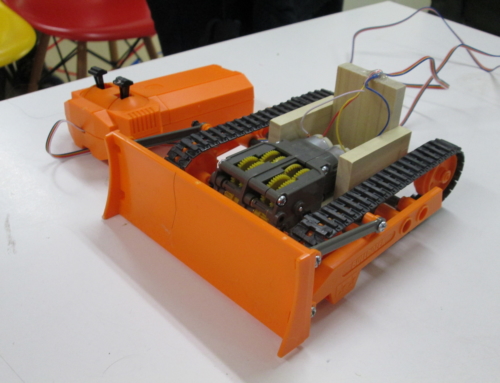
見学者の子が二足歩行ロボットにしました!
自分でリンクをつくると、様々な動きをつくることができます。
その楽しさを学んだ時間でした。
ロボ研の藤田大悟です。
2月のAdvancedコースでは、リンク機構を学んでいます。
前回4足歩行を作った経験を活かし、自分で6足歩行に改造しました。
いろいろとリンク機構を考えながら、動きを観察し、それぞれオリジナルの6足リンクができました。
シンプルな構造を自分でみつけだしました!
やたら足を長くしています。
こちらもスマートな6足歩行。
見学者の子が二足歩行ロボットにしました!
自分でリンクをつくると、様々な動きをつくることができます。
その楽しさを学んだ時間でした。


Leave A Comment