
ロボ研の藤田大悟です。
6月は、電子工作の3回目。
ロボットの動きでかかせないモーターを制御するしくみを学びました。
可変抵抗を繋ぐだけでも、モーターは遅くなりますが、遅くなる分熱にかわってしまい、効率が悪いです。
それを解決する方法として、PWM方式を使う事で、ON/OFFをくり返して、平均的にモーターにかかる電圧を減らし
結果としてスピードを遅くします。
前半でその回路をつくったので、後半は、作ったモーターコントローラーをつかって、
オリジナルの扇風機をつくってもらいました。
まずは、各自設計を行い、講師にOKを貰った人から加工をスタート。
ボール盤、ルーター(回転させて削ったりするもの)なども活用しながらケースにうまく入れこみました。

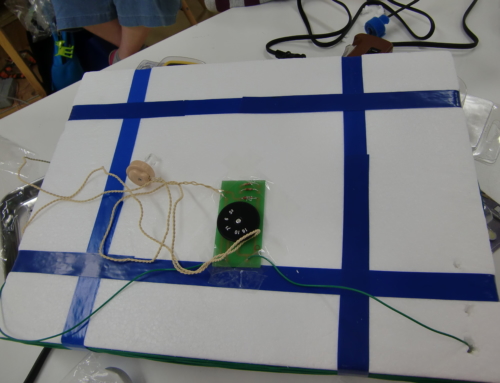
1つは、ボリュームの部分をレバーにして、回転をコントロールするユニークな扇風機ができました。

また、フックを取り付けて、壁掛けの扇風機をつくった子もいました。

同じ材料ですが、各自考えてつくれるようになっているのは、とても嬉しいです。



Leave A Comment