
ロボ研の藤田大悟です。
12月のEngineerコースでは卒業研究を続けています。
先月、キャタピラの乗り物をつくることができたので、今度はそれをプログラミングして動かせるように改造します。
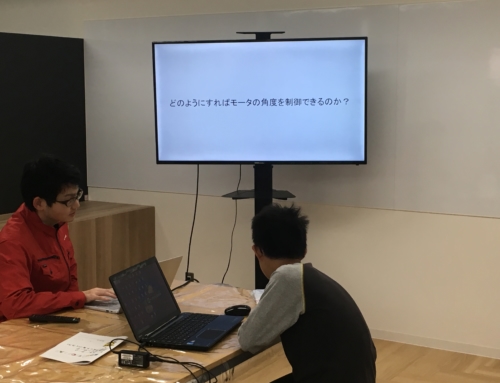
そのために、以前学んだ「がじぇるね」と「モータードライバー」を用いてDCモーターを制御する装置をつくりました。
今回、2つのモーターで前後左右に動くだけでなく、ロボットハンドを使うため、合計4つのモーターを制御する必要があります。
がじぇるねなど、Arduinoのマイコンボードには、「シールド」と呼ばれる、上に載せるだけで、センサーを取り付けたり
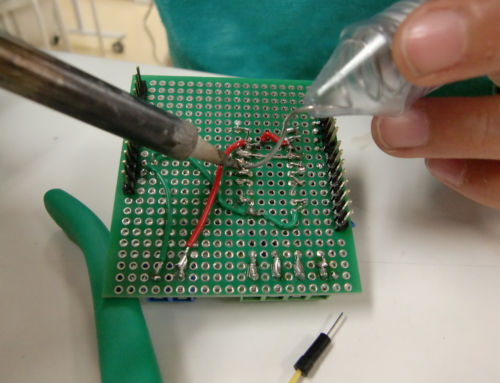
制御したりできる基板があります。今回、4つのモーターを制御する「モーターシールド」を自作しました。
Arduino用の万能基板を購入し、回路図を設計してから、ハンダ付け。
トータル4時間かかって、シールドの完成です。

これに、プログラミングをして、ちゃんと動くか確認です。
OKならば、まずは可変抵抗のボリュームで前後に動くロボットまでは完成します。
次の挑戦は、加速度センサーでのコントロールと、ロボットハンドの制御です。
どんどんハードルが上がっていきますが、挑戦は続きます。
良いお年を!

Leave A Comment