
ロボ研の藤田大悟です。
Engineerコースでは卒業研究をしています。
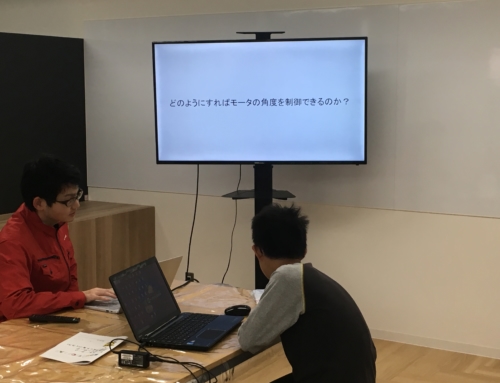
今回の目標は「家でテレビの前に座っていながら、ものを掴んで、手の動きでちかくまで運んでくれるロボット」です。
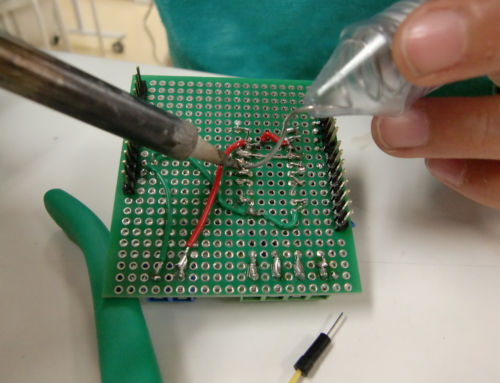
その実現のために、前回モーターコントローラーを基板にとりつけられるよう「シールド」というものを作りました。
今回、それにモーター2つが可変抵抗で制御できるプログラミングをして、動作確認をしようと思ったのですが。。。。
まず、プログラミングがエラー。デバック(プログラムの修正)をしているのですが、なかなか難しい。
1時間苦戦してようやく、ビルド成功!
「がじぇるね」のWebコンパイラに保存しました。
その上で、データ転送して動作確認。
動きません。
シールドの配線を確認したら、グランド(マイナス極)をつけるのを忘れていました1
今度こそ。。。動きません。
何度かやっても今回は時間切れ。
この作業が一番産みの苦しみです。
ここは何度もトライ&エラーをしていくのみ。モーターを1つにしたプログラムに変更し動作確認から挑戦です。
戦いはまだまだつづく。


Leave A Comment