
ロボ研の藤田大悟です。
あけましておめでとうございます。今年もよろしくお願いします。
1月のSmartコースでは、ロボットでは欠かせない「サーボモーター」の原理を理解したもらうために
教材でサーボモーターをつくってもらいます。
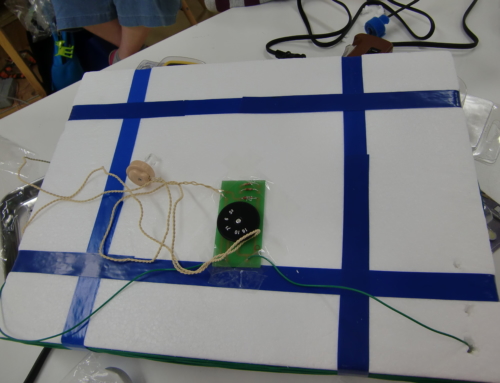
サーボモーターが正しい角度を測定するために、モーターにポテンショメーター(可変抵抗)を使い角度をフィードバックしたもらいます。また、PDI制御というもののなかで、比例制御という回転角度がおきい場合は早く回転し、小さくなったらゆっくり回転することで正確な場所でとまるよう工夫がされていることも伝えました。
そのうえで、制御基板とモーター部分を制作。
なかなか制御部分もPICのマイコンやリレーが入っていたため苦戦。
作業時間1時間半でようやく基板がつくりあげられました。

次回は、モーター部分をつくり、完成させます。
そして、それを改良することで、「マスタースレーブ」のような装置に挑戦していきます。



Leave A Comment