
ロボ研の藤田大悟です。
年が明けてEngineerコースも残り3ヶ月。
「家でテレビの前に座っていながら、ものを掴んで、
手の動きでちかくまで運んでくれるロボット」
これを目指して開発を進めています。
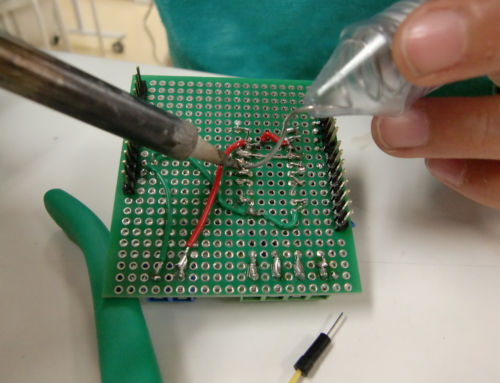
前回、モータードライバーでモーターが動かないという事件が発生し、それを解決すべく、もう一度調整。
よくよくみてみると、プログラミングと指しているピンの番号が違っていたことが判明。
修正して、がじぇるねに入れてみたところ、見事モーターが動きました! しかも可変抵抗を動かすことでモーターの速さがちゃんとコントロールされていることを確認。
その後、可変抵抗を「加速度センサー」に変更。
そうすることで、今回目指している「手の動きでちかくまで運んでくれる」ということを実現させます。
何度か試行錯誤した結果、加速度センサーを傾けることで前後に動くキャタピラが完成!
来月は左右に動くプログラミングをつくり、「物を掴む」装置もとりつけます。
もう二息!


Leave A Comment