
ロボ研の藤田大悟です。
Smartコースもだんだん難しくなってきています。
今回はロボットでは不可欠な「サーボモーター」についてサーボモーター学習キットを用いて学びました。
前回基板を実装し、ハンダづけをしました。
今回、それにモーター&ギヤ&可変抵抗を取り付けてサーボモーターをつくります。
なかなかギヤの噛み合わせがわるくて、うまく制御できない装置が多数。。。結構苦戦しました
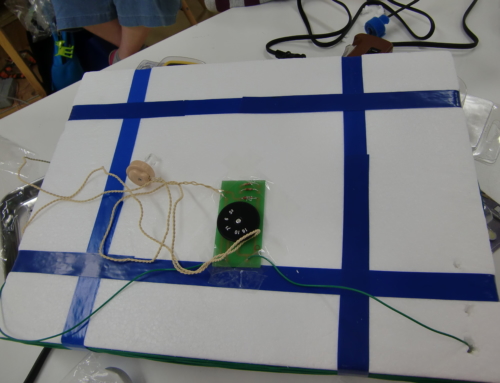
その中でもうまく行った生徒が、マスタースレーブに挑戦。
可変抵抗を肘の関節にとりつけて、肘を動かすとそれにあわせてサーボモーターが動きます。
すごい基礎的な装置ですが、成功した時にはとても興奮しました!

動いている様子も簡単ですが紹介します!



Leave A Comment