
ロボ研の藤田大悟です。
トラブルはノウハウへの第一歩。
モータードライバを4つつけて、双腕ロボットの計画中。

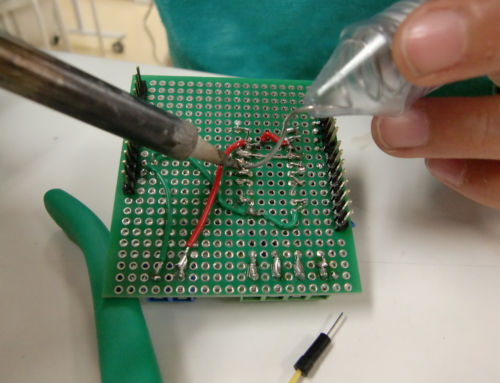
TA7291Pのモータードライバを使う上での注意事項です。
1:GND(がじぇるね/GND端子)と共有
2:モータの端子へ接続
3:NC(なにもつながない)
4:Vref PWM端子(がじぇるね/PWM出力端子)へ接続 ←モーターのスピード調整
5:信号用端子(がじぇるね/デジタル出力端子)へ接続
6:信号用端子(がじぇるね/デジタル出力端子)へ接続
7:Vcc 3.3V電源端子(がじぇるね/3.3V)へ接続 ←モータードライバの電源
8:Vs 外部電源のプラス端子へ接続(乾電池など)←モーターの電源
9:NC(なにもつながない)
10:モータの端子へ接続
最初、Vsは単三電池2個で3Vで行いました。
電圧を確認したら、モータードライバの4,5,6番端子には、可変抵抗を変えたらしっかりと電圧が流れているのが確認できました。でも、どうしてもモーターに電圧が来ない。。。
 データシートやWebページを調べてみると、
モーターで使う外部電源Vsはモーター制御用のPWM端子に流れる電圧Vref(今回、3.3V)より高くなくてはならないとかいてあるではないですか!
たしかに、以前モータードライバをがじぇるねで制御した時は電池4本使いました。
ということで、解決するはず!
データシートやWebページを調べてみると、
モーターで使う外部電源Vsはモーター制御用のPWM端子に流れる電圧Vref(今回、3.3V)より高くなくてはならないとかいてあるではないですか!
たしかに、以前モータードライバをがじぇるねで制御した時は電池4本使いました。
ということで、解決するはず!


Leave A Comment