
ロボ研の藤田大悟です。
卒業研究でスマートロックを目指している生徒がいます。
最終的には無線化を目指しています。
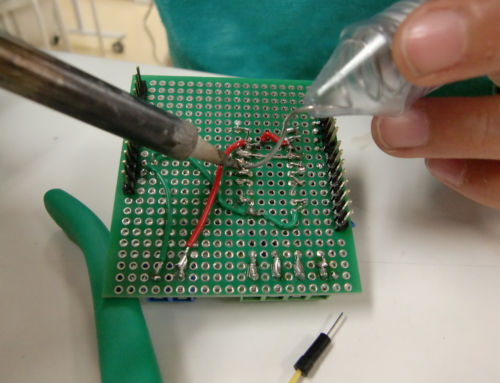
スイッチを1度押すとそれを記憶して、90度サーボを回転してとめます。
もう1度押すと元に戻ります。


プログラミングは以下のとおり
| /*GR-SAKURA Sketch Template Version: V1.08*/
#include<rxduino.h> #include <Servo.h> Servo servo;
const int LED = 13; const int TACT = 7; int val = 0; int old_val = 0; int TactState = 0; void setup() { servo.attach(12); pinMode(LED, OUTPUT); pinMode(TACT, INPUT); } void loop() { val = digitalRead(TACT); if ((val == HIGH) && (old_val == LOW)) { TactState = 1 – TactState; delay(10); } old_val = val; if (TactState == 1) { digitalWrite(LED, HIGH); servo.write(90); delay(10); } else { digitalWrite(LED, LOW); servo.write(0); delay(10); } } |

Leave A Comment