
9月のADコースでは、回転運動を目的の上下運動に変換する「カム」機構について研究しました。
カムは、回転する棒に円板が取り付けられた構造をしています。円板は中心からずれた位置で軸につけてあるため軸を回転させると円板は「腕を振り回す」ような動きをします。この円板に棒や板を乗せると、回転運動はのせたものが上下したり、押し引きされる動きに変わります
この仕組みは、回転に合わせて馬が上下するメリーゴーランドやガソリンエンジンの弁に使われています。
スタートアップでは、キットを使ってカム機構の基本を学びました。
一つのハンドル(軸)を回転させると、取り付けられた2つのカムによって犬の口と骨が動きます。カムの円板を調整することで、犬が骨をキャッチするようにしたり、逆に食べようとすると骨が逃げてしまうような動きを作ることができます

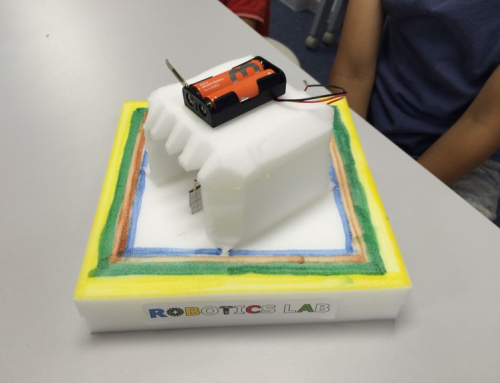
チャレンジタイムでは、カム機構を使ったオリジナルのロボットなどを作製しました。
カムと棒の摩擦など、工夫する点がたくさんあります。カムの形も十人十色、同じ回転なのに、それぞれ異なった動きをするオリジナルのロボットが出来上がりました。

前方のアンテナのような棒が、上下に動きます

中には楕円形のカムがつけられています

こちらは四角形のカムです。スピーディに棒が上下します
10月はギヤボックスを使って、カムなどの仕組みを動かすモーターのパワーを変換する研究に取り組みます!


Leave A Comment