
12月のアドバンストコースでは、2足歩行ロボットの開発を通して、「クランク機構」について学びました。クランク機構は、回転する軸と、それとは中心のずれた軸を結ぶ棒からなる機構です。中心をずらすことで、軸は円運動をするようになり、回転するとともに上下方向にも運動するようになります。この動きの変換を使って、人間のように足と腕を上げ下げしながら動く2足歩行ロボットを作成しました。

キット化されているとはいえ、油断はできません。開発中は集中そのもの!
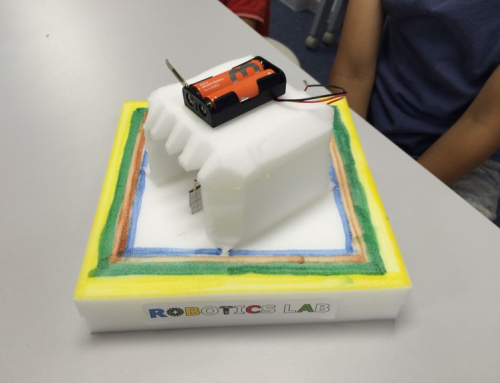
ロボットの作成にはユニバーサルフレームと呼ばれる、軸の位置を自由に変えられる部品を使います。一見、組み立てるだけの簡単なキットに見えますが、クランクの動く範囲を考えないと、動きを伝える棒が突っ張ってしまい、動かなくなってしまいます。また、重い電池ボックスをどこにつけるか、重心を意識して作ることが、安定して歩くか、途中で倒れてしまうかの重要なポイントになります。受講生達は、チャレンジタイムでの4足歩行への改造も通しながら、クランク棒の位置関係やクランク機構による動きの特徴を学んでいきました。

こちらは4足ロボが、自動餅つき機にもなりました。クランク機構で左の棒が、餅つきのように上下に運動します。
1月は、クランク機構のさらに大きな枠組みである「リンク機構」について、より複雑な動きをするロボットを作成しながら学んでいきます!


Leave A Comment