
ロボ研の藤田大悟です。
エンジニアコースでは、今月「モーター」をパソコンから制御する方法を学んでいます。
「がじぇるね」を使って、モーターをだんだん速く動かす事ができ、その制御方法を
回路について学びました。
今回は、前回1つだったモーターのを2つにする事で、自由に前後左右に動く乗り物を
開発しようと、プログラミングに挑戦しました。
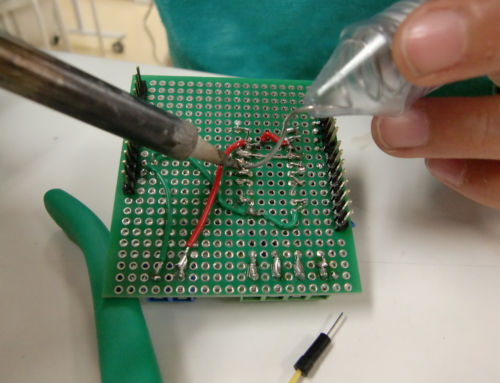
自分で、2つのモーターを動かす回路は難しく、何度もやりなおしながら作り上げました。
そして、なんとか完成。
ボリュームを動かすとそれぞれのモーターを自由に動かす事ができるようになりました。

今回はこちらで時間切れ。
最終目標としては、それでクルマを動かす事です。藤田大悟がためしに作った例です。
これで左右自由に動かせます。
今回はこのように作りましたが、プログラミングを変更焦る事で、
片方のボリュームで前後、もう片方で左右に動きをつくることもできます。
プログラミングを変えて、動きをあとで変更できるのが「マイコンボード」を使う良さですね。


Leave A Comment