
ロボ研の藤田大悟です。
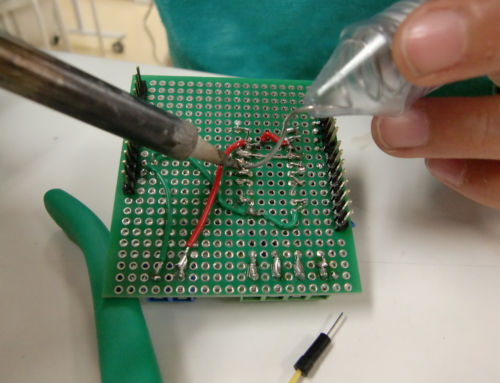
Engineerコースの8月は、ロボット開発には欠かせない「サーボモーター」を
がじぇるねのマイコンを使って制御する方法を学びました。
まずは、サーボモーターを指定の角度に動かすプログラムの作成。
つづいて、可変抵抗によるアナログ入力に対応して、サーボモーターが回転するような
プログラムをつくりました。
だいぶ何度も可変抵抗をつかってきているので、プログラムの文章がわかってきたようです。
次回は、可変抵抗でなく加速度センサーを用いてモーションキャプチャーできるロボを作ります。


Leave A Comment