
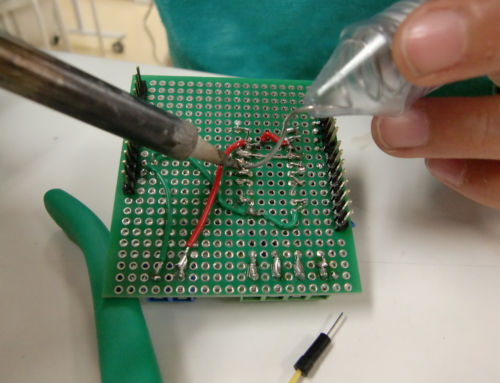
加速度センサーで動きを認識し、サーボモータ2個を制御することでマスタースレーブが作ることが出来ます。
【参考プログラム GR-SAKUAR】
#include
Servo servo1;
Servo servo2;
void setup()
{
servo1.attach(13);
servo2.attach(12);
analogReference(EXTERNAL);
}
void loop()
{
int yoko=analogRead(14);
int takasa=analogRead(15);
int ang1=map(yoko,0,1023,0,180);
int ang2=map(takasa,0,1023,0,180);
servo1.write(ang1);
servo2.write(ang2);
delay(100);
}
実際の動画↓

Leave A Comment