
ロボティクスラボのダイゴ先生がおうちでつくれるロボットを紹介します!
「子供の科学」(誠文堂新光社)でもコーナー連載中!
リンク機構に注目!
リンク機構とは、リンク(骨)とジョイント(関節)を組み合わせて動きを作り出すしくみです。
リンクとジョイントをうまく組み合わせることで、モーターの回転を上下左右の運動に変えたり、楕円軌道で回転させたりすることができます。リンクやジョイントの数を増やすと、より複雑な動きを作り出すことができます。
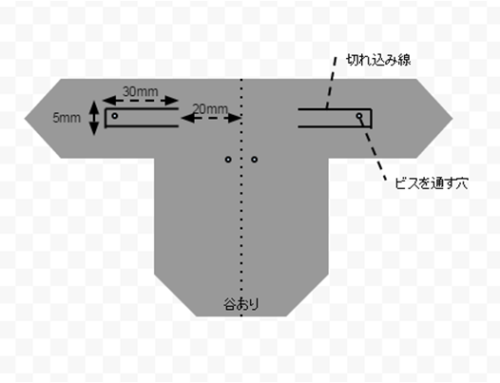
リンク機構でパンタグラフを作ってみよう
<材料・工具>
1、リンク機構で、マジックハンドをつくろう!
<材料>
・ユニバーサルアーム 2本
・プッシュリベット 4セット
・輪ゴム 2本

2、パンタグラフをつくって、文字を拡大してみよう!
<材料>
・ユニバーサルアーム 2本
・プッシュリベット 9セット
・L型アーム2本
・マジック 1本
・輪ゴム 1本

<作り方>
ダイゴの大調査「スケルトニクスが●●体操をすると…こうなる…!?」もぜひご覧ください
スケルトニクスは、パンタグラフと同じしくみで、人がロボットに乗り込んで腕や足を動かすと、その動きを2倍の大きさに拡大して同じ動きをさせることができる外骨格ロボットです。

Leave A Comment