
リバネス ロボティクス研究所の藤田大悟です。
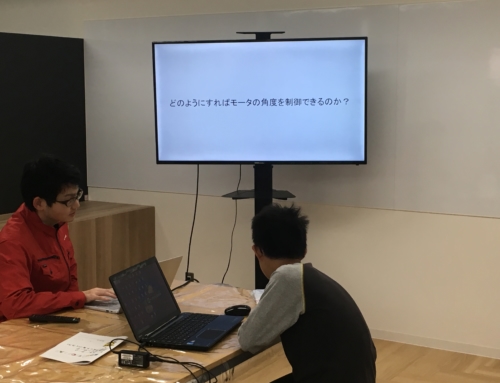
今月のロボ研では、ロボットを制御するために必要なモータを制御する方法を学びます。
マイコンボード「がじぇるね」をつかって、プログラミングをしてみました。
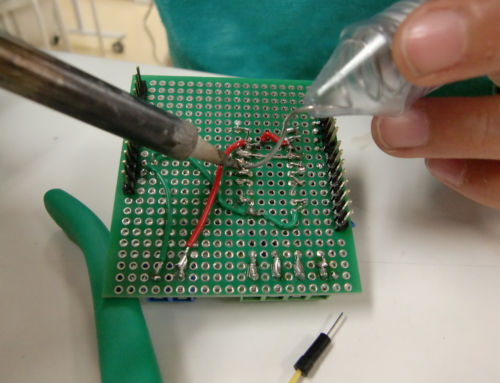
モータドライバはピン数が多かったため、どれをどれに挿すかを気をつけながらとりつけました。
はじめは大変ですが、慣れてくるとパターンがみえてくるので動かすのを楽しみました。

プログラミング
#include <rxduino.h>
const int SENSOR = 14;
const int drive6 = 1;
const int drive5 = 2;
const int drive4 = 3;
int sensVAL = 0;
void setup(){
pinMode(drive6,OUTPUT);
pinMode(drive5,OUTPUT);
pinMode(drive4,OUTPUT);
}
void loop(){
sensVAL=analogRead(SENSOR)/2;
if (sensVAL>=255 && sensVAL<=256)
{
digitalWrite(drive6, LOW);
digitalWrite(drive5, LOW);
}
else if (sensVAL>256)
{
digitalWrite(drive6, HIGH);
digitalWrite(drive5, LOW);
analogWrite(drive4, sensVAL-256);
}
else
{
digitalWrite(drive6, LOW);
digitalWrite(drive5, HIGH);
analogWrite(drive4, 255-sensVAL);
}
}

Leave A Comment