
ロボ研の藤田大悟です。
11月のSmartコースでは、赤外線センサを使いました。
最初に赤外線ライトを作り、赤外線を受信するフォトトランジスタの性能を調べました。
その後、赤外線センサーにしたがって、モーターの動きを切り替える基板をつくりました。
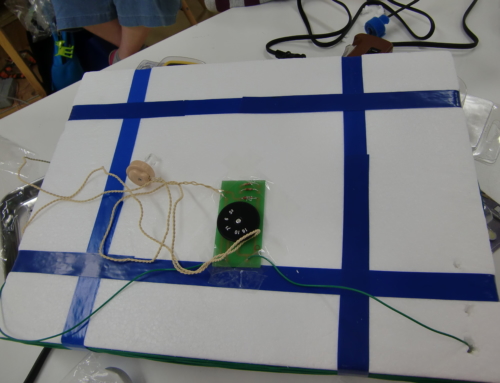
そしてできたのが、赤外線追尾ブルドーザー。
結構しっかり進みます。今まで作ったものに、センサーを取り付けることでロボットになる。
この流れを理解してくれると、幅が広がります。


ロボ研の藤田大悟です。
11月のSmartコースでは、赤外線センサを使いました。
最初に赤外線ライトを作り、赤外線を受信するフォトトランジスタの性能を調べました。
その後、赤外線センサーにしたがって、モーターの動きを切り替える基板をつくりました。
そしてできたのが、赤外線追尾ブルドーザー。
結構しっかり進みます。今まで作ったものに、センサーを取り付けることでロボットになる。
この流れを理解してくれると、幅が広がります。



Leave A Comment