
ロボ研の藤田大悟です。
エンジニアコースの開発がすすんでいます。
ロボットハンドがどんどん組み立てられていきました。
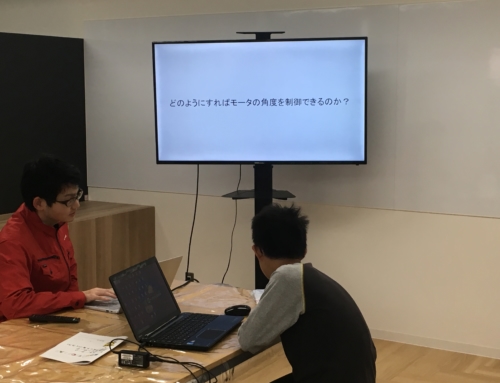
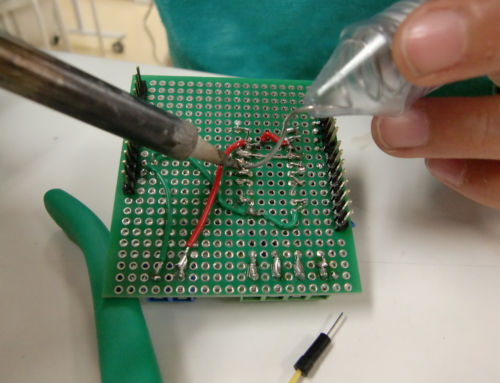
モーター制御をして、操れるように回路設計も挑戦しています。

ライントレーサーも徐々に組み立てられています。
スイッチの配置や回路など、検討するべきところは増えてきています。

そして、おもむろにおいてあった、缶。
生徒が飲んだのではありません。これがロボットになるようです!?

さて、どのようなロボットになるのか注目です。
こちらを動かすためには、GR-SAKURAボードではなく、GR-KURUMIの小型ボードを使う予定。
使い方を確認しておきました。→http://blog.livedoor.jp/fdaigo/archives/1938698.html
来月には、形をある程度完成させ、プログラミングに入っていきます。
年内にどこまで出来るかが勝負ですね。

Leave A Comment